PoDA
Poaching detection and Alerter


The problem PoDA solves
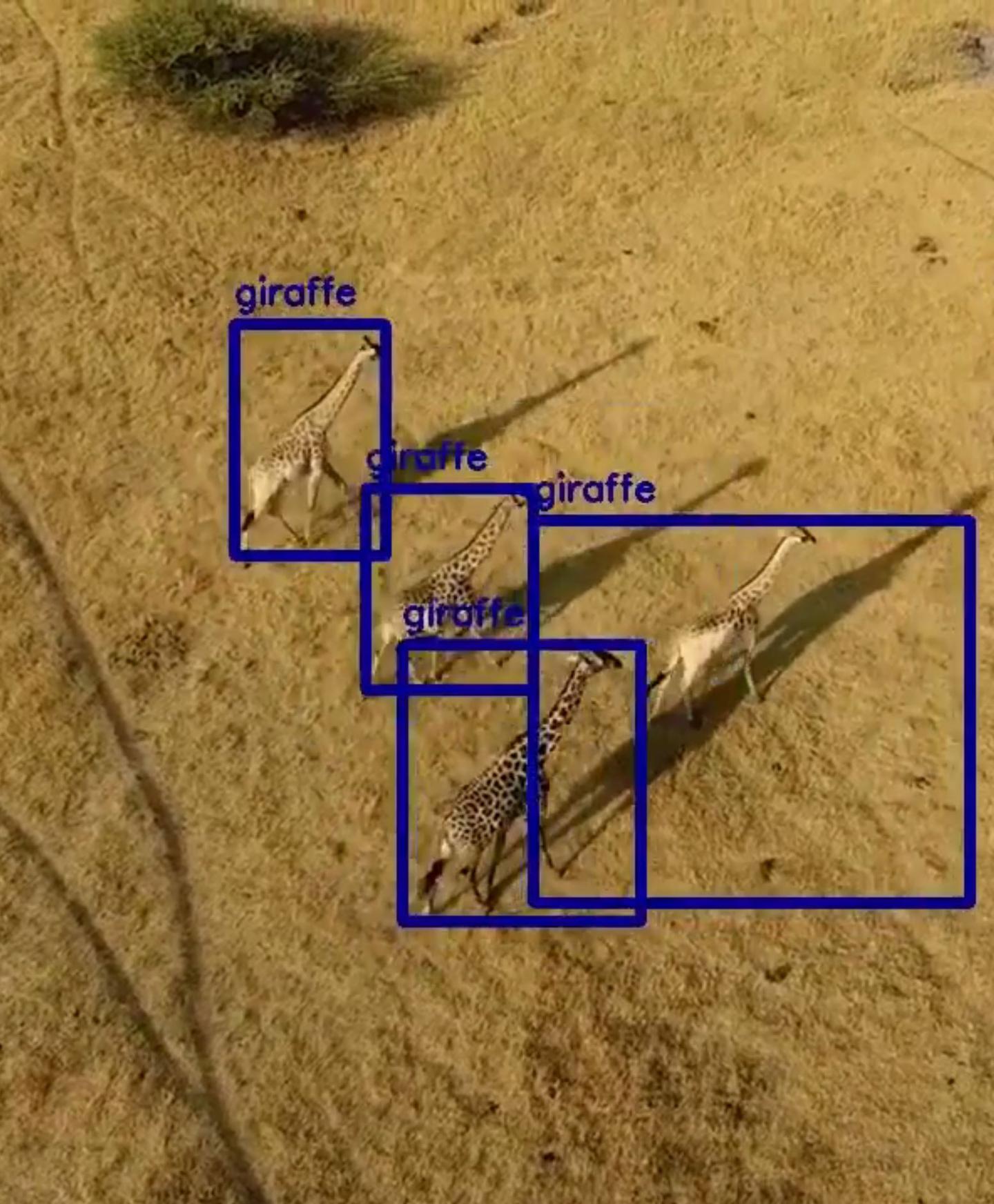
The prototyped solution would have a life-changing impact on animals and probably help us catch the predators too. Implementing this technology solution into the real world,red uces the poaching curve to the minimum. Not only being the eyes from the sky, our prototype can get the clear image of the terra-firma and detect what is what with the help of its camera.
It flies down to a stealth level and sends us the interactive feedback of the place by taking a video or a photo. This solution can detect people, weapons, animals, trees and many more. Further developments in this project include the predicting of the type animal and the exact location of the hunt, so that the task force could immediately come to the respective place and act. The respective organizations need not require any strains and moreover it need not rely on other solutions by utilizing the product. The lives of animals will get saved from poaching.
The prototype will change into an “Aerial surveillance” once it takes off to the heights of the skies/clouds once we market it and make it even more scalable. This is completely remote controlled (for now at least).
Using the latest advances in Machine Learning and Computer Vision, we are trying to transform the lives of the muted ones (animals).
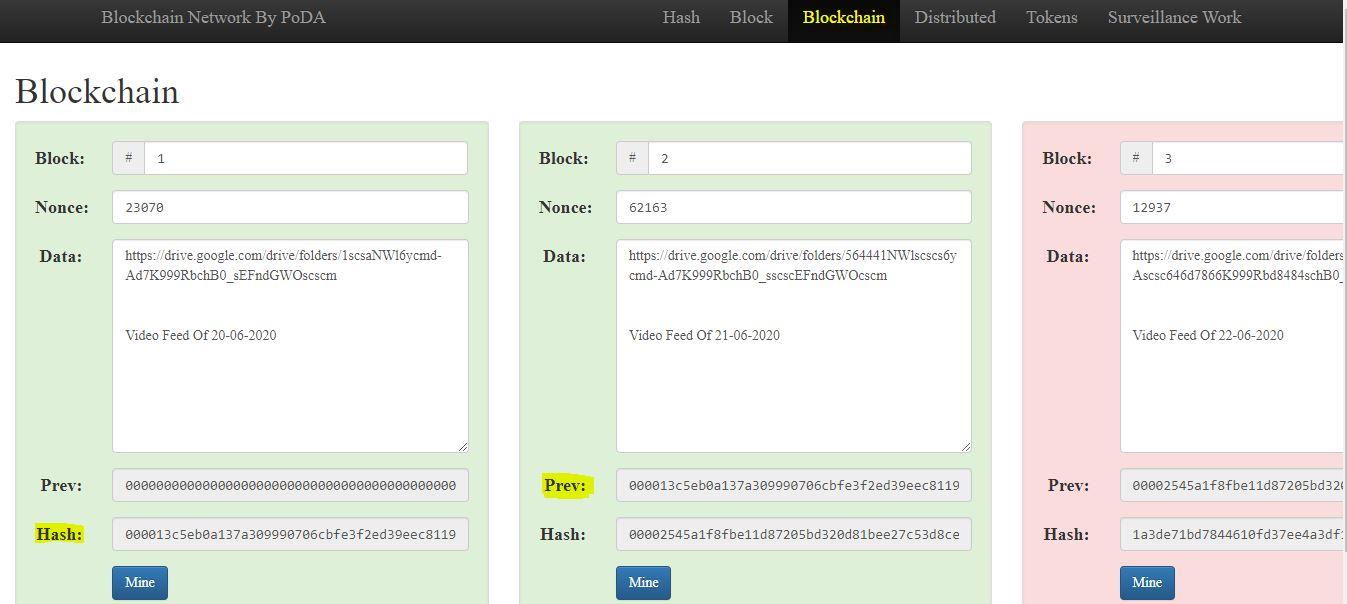
DRONEYES can describe what’s going on the ground through the video output we get on the user side. It can help to find things around the scouted area by describing, which is human, animal (by species) immediately and gives the exact position of the area that needs to be scouted. With the help of cloud technology, we can share the data in real time.
We are working on the GPS module and the Flight Controller for the drone. The flight controller is necessary for the stability of the drone. The Global Positioning System or GPS is a device that has a capability to measure how long a signal takes to travel f
Challenges we ran into
.Integrating the object detection into the drone’s camera is a big challenge that we faced during the hackathon.
The drone’s flight controller gave us a trouble during the hackathon, this made us tensed and nervous about the result, but we finally made it possible by solving it.
The most important thing is to integrate the sub-modules to a whole project prototype.
Technologies used