<Astute Bots>
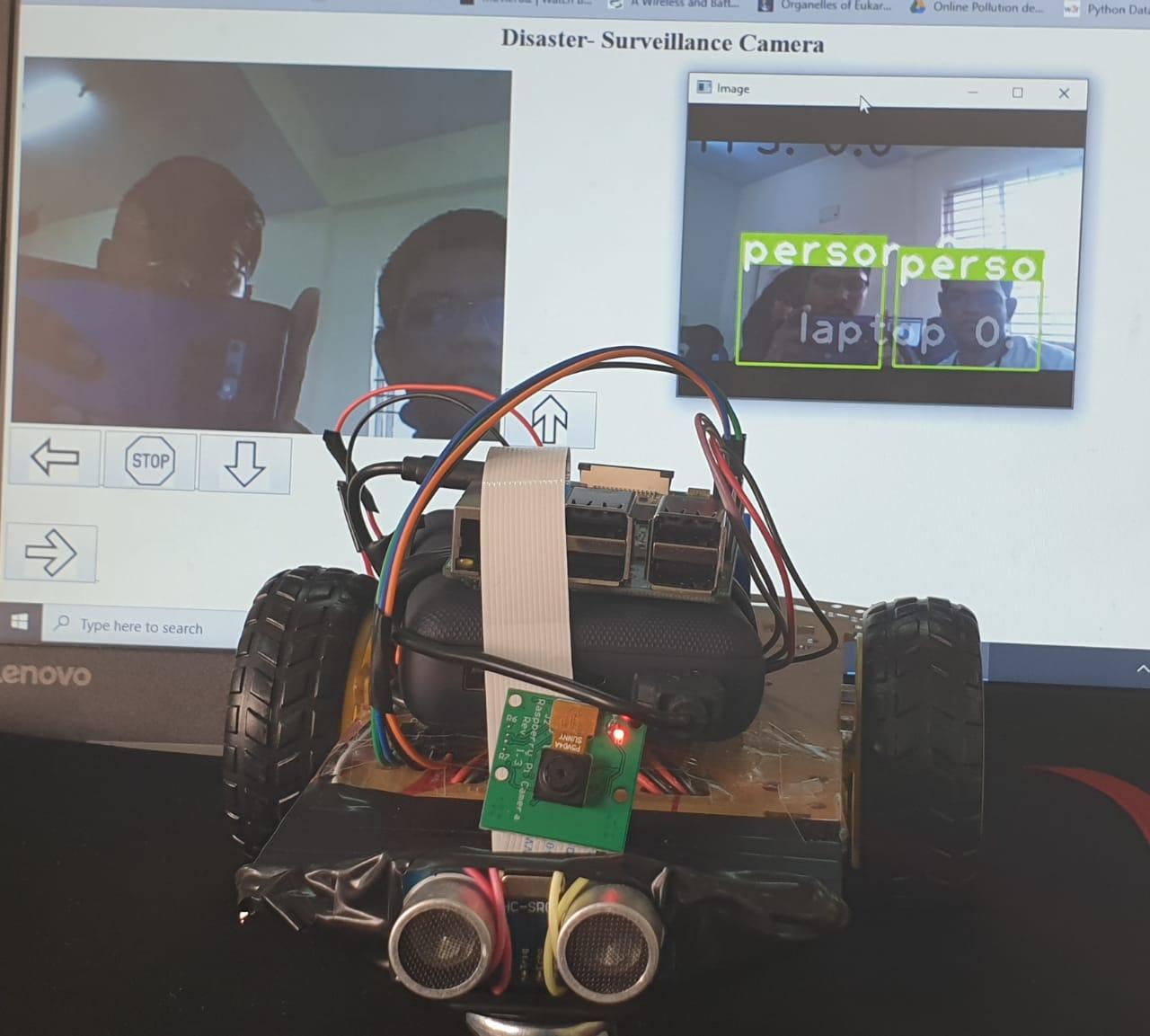
We have created a Rasberry-Pi based rover controlled remotely by a webpage with cloud-based API integrated to perform real-time object detection using the pi cam attached to the rover.
Created on 5th March 2020
•
<Astute Bots>
We have created a Rasberry-Pi based rover controlled remotely by a webpage with cloud-based API integrated to perform real-time object detection using the pi cam attached to the rover.

The problem <Astute Bots> solves
Problem Statement: There is a need to design drones and robots that can solve some of the pressing challenges of India such as handling medical emergencies, search and rescue operations and disaster management.
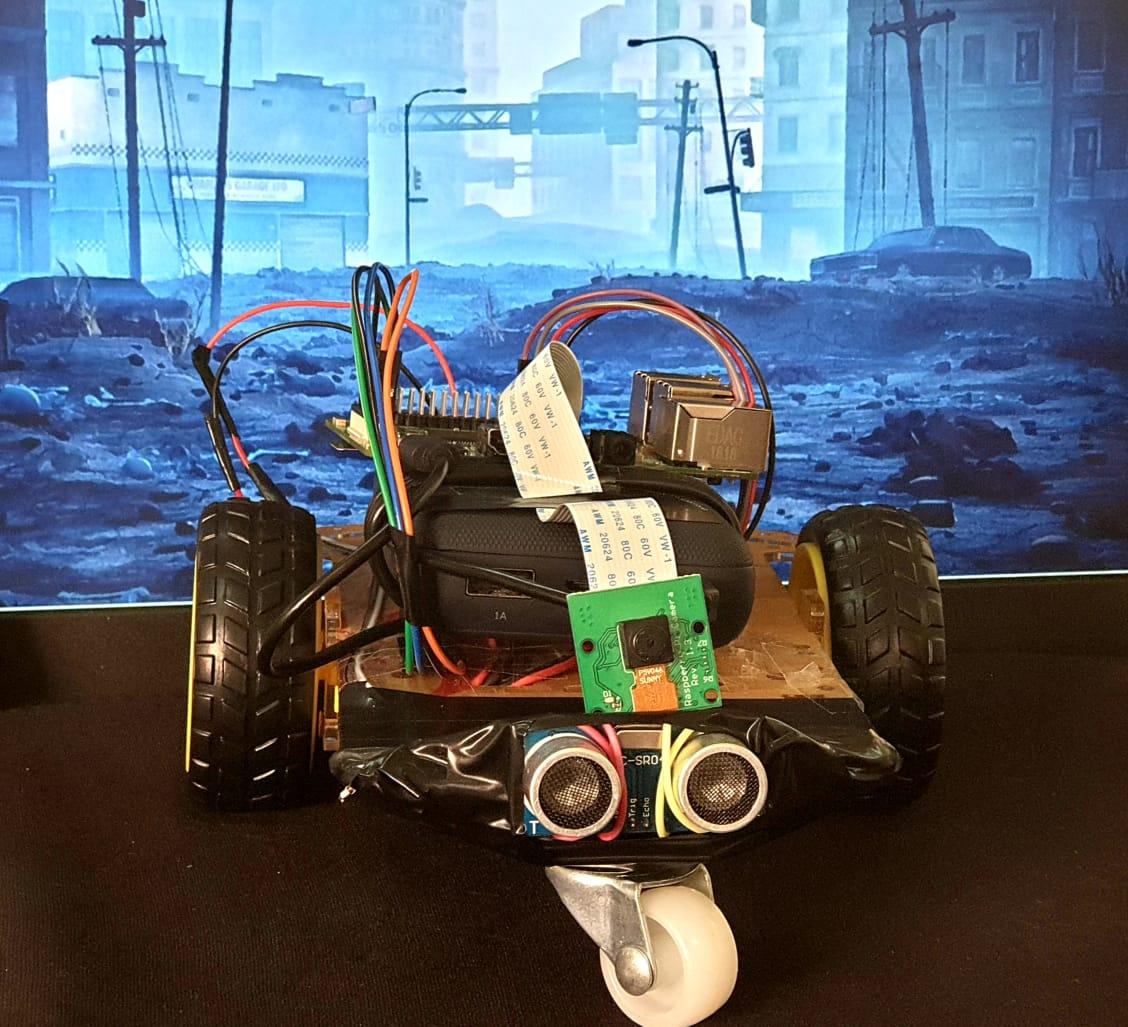
We propose to solve this problem by using our EM BOT, which can be controlled in numerous ways.
Control Methods:-
1.Via Webpage
2.Autonomous Mode
3. Bluetooth(5.0) via an APP
Numerous ways of controlling a rover gives it the ability to navigate through many different conditions.
It can be used in any case, for instance, to navigate through debris in a natural calamity or to assess the situations in
places were risking lives is not an option
Challenges we ran into
1.Integrating IBM cloud-based API for object detection was one of the challenges it was made harder due to the unstable wifi connection.
2.Controlling gpio pins of rover using HTML tags was difficult this was overcome by defining gpio pins and functions in separate files.
Technologies used